Все статьи Рисуем куб, моделируем камеру
В этой статье мы научимся рисовать простой трёхмерный объект — куб. Также мы запрограммируем виртуальную камеру, позволяющую взглянуть на куб глазами зрителя.
Создаём проект
Обновите локальный репозиторий cg-course-2018/QtLabs2D, переключитесь на ветку sample08. Затем создайте новую ветку, уникальную для вас и этого задания (например, %фамилия%_sample08).
Затем откройте QtLabs2D.sln и соберите проекты. Откройте проект Sample08 - в нём вы будете выполнять разработку. Но до этого мы доработаем заготовку проекта, чтобы добавить поддержку рендеринга в 3D пространстве. Места, где надо внести изменения, перечислены ниже; также вы можете их найти по комментариям // TODO: ...
Включаем тест глубины и отсечение задних граней
Добавьте в Simple3DScene::initialize() настройку состояния OpenGL: включение теста глубины и отсечения задних граней.
// Включаем тест глубины.
glEnable(GL_DEPTH_TEST);
// Включаем отсечение задних граней
glEnable(GL_CULL_FACE);
glFrontFace(GL_CCW);
glCullFace(GL_BACK);
Не забудьте добавить в метод рендеринга сцены очистку буфера глубины (а не только буфера цвета):
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
Устанавливаем матрицу проецирования
Чтобы выполнялось перспективное преобразование, мы должны передать в вершинный шейдер матрицу перспективного преобразования. Эта матрица будет создаваться классическим путём, который реализован в функции glm::perspective. Мы должны указать несколько параметров:
- fieldOfView - угол обзора зрителя
- aspect - соотношение ширины и высоты окна (чтобы изображение не искажалось по ширине или высоте)
- zNear - расстояние до ближней плоскости отсечения, больше нуля
- zFar - расстояние до дальней плоскости отсечения, больше zNear
- Чем больше разница между zNear и zFar, тем больше погрешности вычислений глубины и больше перспективные искажения объектов, поэтому разницу между zNear и zFar желательно оставлять минимальной допустимой для вас
Добавьте в метод Simple3DScene::setProjectionMatrix следующий код:
// Вычисляем матрицу перспективного проецирования.
// Затем передаём матрицу как константу в графической программе.
const float fieldOfView = glm::radians(70.f);
const float aspect = float(width) / float(height);
const float zNear = 0.05f;
const float zFar = 50.f;
const glm::mat4 mat = glm::perspective(fieldOfView, aspect, zNear, zFar);
glUniformMatrix4fv(glGetUniformLocation(m_program, "u_projection_matrix"), 1, GL_FALSE, glm::value_ptr(mat));
Собираем программу
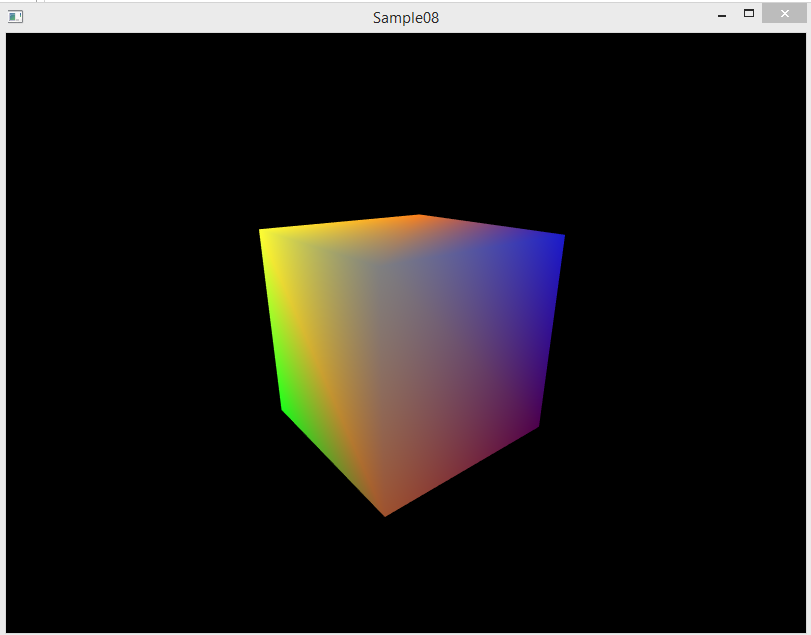
На этом этапе вы можете собрать программу и запустить её. Если всё было сделано правильно, вы увидите разноцветный куб в центре экрана.
Воспользуйтесь виртуальной камерой:
- W/A/S/D - движение камеры
- перетаскивание курсора при нажатой левой клавише мыши - поворот камеры (тангаж и рысканье)
Добавляем вращение куба
В классе MeshP3C3 добавлено свойство transform. Мы будем устанавливать его перед каждым кадром. Для этого добавьте следующий код в метод Simple3DScene::update():
// Вращаем куб вокруг оси Oy (вертикальной оси).
const float cubeRotation = glm::radians(CUBE_ROTATE_SPEED * deltaSeconds);
m_cubeTransform.rotateBy(glm::angleAxis(cubeRotation, glm::vec3{ 0, 1, 0 }));
m_cube.setTransform(m_cubeTransform);
На этом этапе вы можете собрать программу и запустить её. Если всё было сделано правильно, вы увидите вращающийся разноцветный куб в центре экрана.
Включаем режим wireframe
Добавьте в метод рендеринга сцены установку в glPolygonMode в один из двух режимов: GL_FILL (по умолчанию) либо GL_LINE, в зависимости от значения поля m_renderWireframe:
// Выбираем режим рендеринга треугольников: только линии (wireframe mode) либо полная заливка.
glPolygonMode(GL_FRONT_AND_BACK, m_renderWireframe ? GL_LINE : GL_FILL);
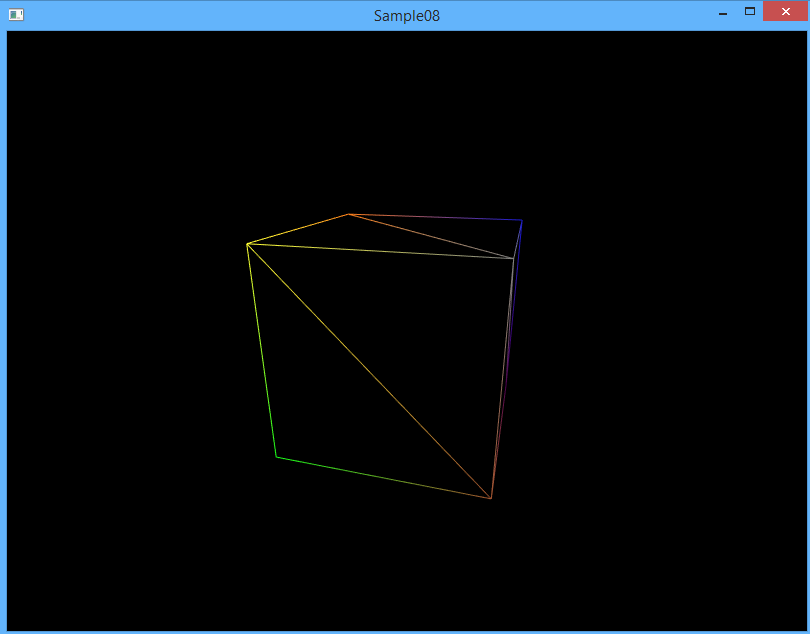
Соберите программу и запустите. Вы должны увидеть периодическое переключение между wireframe режимом и обычным рендерингом:
Триангуляция тетраэдра
Вершины куба
В чём OpenGL измеряет расстояния в трёхмерном мире? В 2D графике всё понятно: у нас есть пиксели. На трёхмерной проекции объекты одинакового размера могут дать разные проекции из-за перспективного искажения: чем дальше поверхность или линия, тем она меньше. Поэтому OpenGL измеряет расстояния в единицах измерения, не уточняя, в каких именно. Вы можете измерять в метрах, попугаях или в футах — на картинке это не имеет разницы, потому что исходные размеры не совпадают с проекциями.
Кроме того, трёхмерные тела поддаются преобразованиям. Поэтому мы будем рисовать только единичный куб и не станем заботиться о поддержке масштаба, вращения и положения центра куба. Единичный куб лежит в координатах от -1 до +1, т.е. каждое ребро имеет длину 2.
В примере вы можете найти следующий код:
struct VertexP3C3
{
glm::vec3 pos;
glm::vec3 color;
};
const glm::vec3 kYellowColor = { 1.0f, 1.0f, 0.2f };
const glm::vec3 kOrangeColor = { 1.0f, 0.5f, 0.1f };
const glm::vec3 kBlueColor = { 0.f, 0.4f, 0.6f };
const glm::vec3 kGreenColor = { 0.1f, 1.0f, 0.1f };
const glm::vec3 kDarkBlueColor = { 0.1f, 0.1f, 0.8f };
const glm::vec3 kVioletColor = { 0.3f, 0.0f, 0.3f };
const glm::vec3 kLightGrayColor = { 0.5f, 0.5f, 0.5f };
const glm::vec3 kBrownColor = { 0.62f, 0.32f, 0.18f };
// Вершины куба служат материалом для формирования треугольников,
// составляющих грани куба.
const VertexP3C3 kCubeVerticies[] = {
{ { -1, +1, -1 }, kYellowColor },
{ { +1, +1, -1 }, kOrangeColor },
{ { +1, -1, -1 }, kBlueColor },
{ { -1, -1, -1 }, kGreenColor },
{ { -1, +1, +1 }, kLightGrayColor },
{ { +1, +1, +1 }, kDarkBlueColor },
{ { +1, -1, +1 }, kVioletColor },
{ { -1, -1, +1 }, kBrownColor },
};
Триангуляция куба
После того, как мы выписали список вершин куба, следует распределить вершины по треугольникам. У куба 6 квадратных граней, их можно описать 12-ю треугольниками. При этом вершины каждого треугольника следует перечислять по часовой стрелке для наблюдателя, смотрящего снаружи куба на этот треугольник. В противном случае треугольник станет поверхностью, видимой изнутри куба, что нарушает физические законы.
Процесс разделения поверхности на треугольники называют триангуляцией (англ. triangulation). Куб достаточно прост, чтобы выполнить триангуляцию в полуавтоматическом режиме. Для выполнения этой задачи сделаем визуализацию куба с вершинами, нумерованными в том же порядке, в котором они были перечислены ранее в массиве:
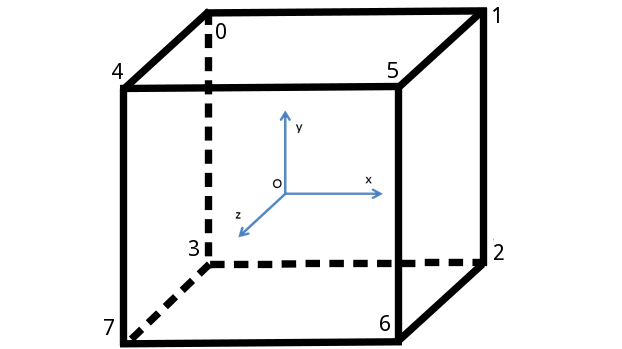
// Индексы вершин задают косвенный способ получения вершины для
// каждого из треугольников.
const glm::uvec3 kCubeIndexes[] = {
{ 0, 1, 2 },
{ 0, 2, 3 },
{ 2, 1, 5 },
{ 2, 5, 6 },
{ 3, 2, 6 },
{ 3, 6, 7 },
{ 0, 3, 7 },
{ 0, 7, 4 },
{ 1, 0, 4 },
{ 1, 4, 5 },
{ 6, 5, 4 },
{ 6, 4, 7 },
};
Для триангуляции куба мы должны пройтись по массивам данных и сформировать буферы вершин и индексов:
MeshDataP3C3 tesselateCube(const Transform3D &transform)
{
MeshDataP3C3 data;
// Копируем вершинные данные, затем трансформируем их.
data.vertexes.assign(std::begin(kCubeVerticies), std::end(kCubeVerticies));
const glm::mat4 transformMat = transform.toMat4();
for (auto &v : data.vertexes)
{
const glm::vec4 transformed = transformMat * glm::vec4(v.position, 1.f);
v.position = { transformed.x, transformed.y, transformed.z };
}
// Копируем индексы вершин.
data.indicies.reserve(3 * std::size(kCubeIndexes));
for (const auto &triangleIndexes : kCubeIndexes)
{
data.indicies.push_back(triangleIndexes.x);
data.indicies.push_back(triangleIndexes.y);
data.indicies.push_back(triangleIndexes.z);
}
return data;
}
Задание cg8.1: триангуляция тетраэдра
Куб относится к так называемым Платоновых тел, в число которых также входят тетраэдр, октаэдр, икосаэдр и додекаэдр.
Каждый из этих пяти многогранников является выпуклым, каждая грань является правильной двумерной фигурой, и к каждой вершине сходится одинаковое число рёбер. Такие тела обладают высокой степенью симметрии, а способы расчёта координат их вершин широко известны.
Правильный тетраэдр — это правильный многогранник, состоящий из четырёх граней, каждая из которых является правильным треугольником (с равными сторонами и равными углами по 60°). Как и другие Платоновы тела, тетраэдр является выпуклым и обладает высокой степенью симметрии. Сделав простое построение, можно аналитически рассчитать соотношения между его сторонами и особыми внутренними линиями, такими, ка высота тетраэдра (перпендикуляр из вершины к противоположной грани). Вычислим эти отношения:
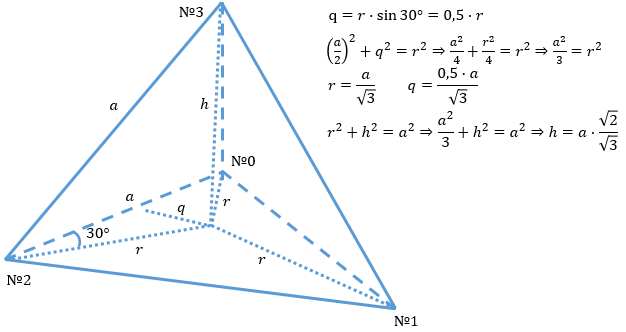
Требуется добавить функцию триангуляции тетраэдра со сторонами размером √3. Список координат вершин представлен ниже, список индексов треугольников, содержащих эти вершины, вам нужно составить самостоятельно. Тетраэдр должен быть залит четырьмя разными цветами. Для этого вы можете доработать kTetrahedronVerticies в примере ниже:
// Сторона тетраэдра равна √3,
// расстояние от центра грани до вершины равно 1.
const VertexP3C3 kTetrahedronVerticies[] = {
{0.f, 0.f, -1.0f},
{std::sqrt(1.5f), 0.f, 0.5f},
{-std::sqrt(1.5f), 0.f, 0.5f},
{0.f, std::sqrt(2.f), 0.f},
};
Задание cg8.2
Изучите, что представляет из себя Крен летательного аппарата. Добавьте в класс FlyingCamera новый параметр в метод rotate: roll (крен).
- добавьте обработку этого параметра в методе rotate
- добавьте возможность задавать крен камеры с помощью перетаскивания мыши вправо/влево при зажатой правой клавише мыши - для этого доработайте класс CameraController
Иллюстрация крена на 360°:
Другую иллюстрацию вы можете найти, введя в google запрос do a barrel roll.
Задание cg8.3
Добавьте в класс CameraController возможность поворота камеры не только при перетаскивании мыши, но и по нажатию клавиш Up/Down/Left/Right на клавиатуре.
Задание cg8.4
Используя шаблон проектирования Декоратор, разработайте класс CameraControllerDisabler со следующим интерфейсом:
class CameraControllerDisabler final : public ICameraController
{
public:
explicit CameraControllerDisabler(ICameraControllerPtr nested);
// Блокирует управление камерой на N секунд.
void disableFor(float seconds);
void update(float deltaSeconds) final;
private:
ICameraControllerPtr m_nested;
};
Блокирование управления камерой можно инициировать из метода update класса сцены. Добавьте блокировку управление камерой на первые 5 секунд после запуска программы.